AIoTソリューション
屋内ナビゲーションシステム
屋内用ナビゲーションシステムは、デジタルカメラの3D技術、レーザー測位、ビジョン測位、QRコード、IMU補正アルゴリズムを活用し、自身の位置や向きを測定してナビゲートを行うシステムです。
レーザー測位/ビジョン測位/
QR書込 /
IMU補正アルゴリズム
概要
ソリューション概要
従来の移動ロボットに搭載されるビジョンおよびLiDARは、主に環境認識や経路計画、障害物回避に利用されています。しかし、実際の自動走行においては、オドメトリ誤差の蓄積や車体の慣性・スリップ、さらには積載物の重心変化などの影響により、位置精度が徐々に低下し、停止位置にズレが生じるという課題があります。高精度作業では、停止位置の誤差が後工程に重大な影響を与える可能性があります。
屋内ナビゲーションソリューションでは、こうした課題を解決するために、ビジョンマーカーを活用した高精度な位置補正機能を導入しています。既存のカメラの活用、または追加のビジョンセンサーにより、目標位置に設置されたQRコード(AprilTag/QR Code)を認識し、補正アルゴリズムによって現在位置を補正します。これにより、最終停止位置での高精度な位置合わせを実現し、安定したドッキングや精密作業を可能にします。
このシステムでは、画像処理だけではなく、レーザー装置による測位も行うことで精度向上を実現し、誤差5cm以下を実現する。
*自社検証。座標測定器およびレーザー計測器で設定された目標物に対する精度検証を行った結果、3.6cm以下の誤差で実証済。
AMRロボットコントローラシステムの検証テストや、屋内ナビゲーションのPOCなど、実機を用いた評価・実証にも対応している。

Highlights
主なポイント
屋内用ナビゲーションシステムは、デジタルカメラの3D技術、レーザー測位、ビジョン測位、QRコード、IMU補正アルゴリズムを活用し、自身の位置や向きを測定してナビゲートを行うシステムです。
- 高精度な最終位置補正
QRコードとビジョンアルゴリズムにより、±3~10mmレベルの高精度な位置決めが可能
誤差累積の抑制
ナビゲーション中に蓄積される位置誤差を最終工程で補正し、安定した停止精度を確保
負荷変動への高い適応性
積載物の重量や重心変化による停止ズレをビジョン補正で吸収
既存システムとの高い互換性
既存のカメラの流用、または追加センサーにより柔軟に導入可能
多様な環境への対応
倉庫、工場、クリーンルームなど様々な屋内環境に適用可能
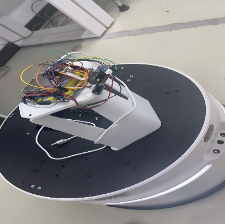
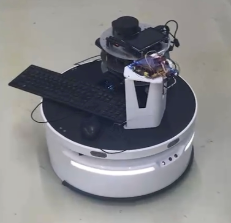
関連イメージ
関連イメージ
屋内ナビゲーションシステム紹介資料 に含まれる図版を、ページ内でもすべて確認できるように掲載しています。




活用例
主な応用シーン
- 高密度倉庫における庫位対接
- AMR / AGVの精密ドッキング
- 重載搬送プラットフォーム、生産ライン連携、検査・計測装置との連携
ご支援内容
ご支援内容
- 屋内ナビゲーションシステムの構成設計と測位方式の検証
- 画像処理とレーザー装置を組み合わせた高精度測位評価
- PoC、評価試験、導入前検証まで一貫して支援
ソリューション価値
屋内ナビゲーションシステム紹介資料
屋内用ナビゲーションシステムは、デジタルカメラの3D技術、レーザー測位、ビジョン測位、QRコード、IMU補正アルゴリズムを活用し、自身の位置や向きを測定してナビゲートを行うシステムです。
資料プレビュー
資料でわかること
屋内ナビゲーションシステムの仕組み、測位精度、実機評価の例をまとめた資料を確認できます。
- デジタルカメラ3D技術と棚設置QRコードを活用した測位の仕組み
- 画像処理と測位を組み合わせた高精度化の考え方
- AMRロボットコントローラ検証テストやPOCの実例